Generating a Data Base with Homotopic Trajectory Transitioning
# We first import the resourcesimportsyssys.path.append('..')fromTrajectoryimportPoint_LanderfromOptimisationimportHermite_SimpsonfromPyGMOimport*fromnumpyimport*frompandasimport*importmatplotlib.pyplotasplt
# We instantiate the problemprob=Hermite_Simpson(Point_Lander(si=[0,1000,20,-5,9900]))
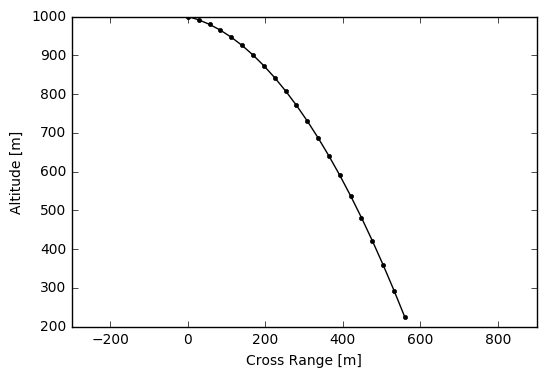
# Let us first supply a ballistic trajectory as a guesszguess=prob.Guess.Ballistic(tf=28)
# Decode the guess so we can visualisetf,cb,s,c=prob.Decode(zguess)
plt.plot(s[:,0],s[:,1],'k.-')plt.axes().set_aspect('equal','datalim')plt.xlabel('Cross Range [m]')plt.ylabel('Altitude [m]')plt.show()
# Use SLSQP and alternatively Monotonic Basin Hoppingalg1=algorithm.scipy_slsqp(max_iter=3000,screen_output=True)alg2=algorithm.mbh(alg1,screen_output=True)
# Instantiate a population with 1 individualpop=population(prob)# and add the guesspop.push_back(zguess)
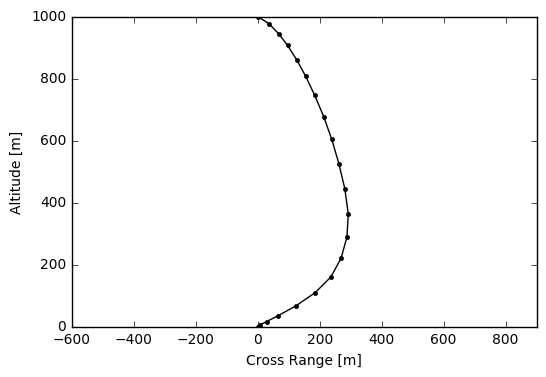
# We then optimise the trajectorypop=alg1.evolve(pop)
# We now visualise the optimised trajectorytf,cb,s,c=prob.Decode(pop.champion.x)plt.plot(s[:,0],s[:,1],'k.-')plt.axes().set_aspect('equal','datalim')plt.xlabel('Cross Range [m]')plt.ylabel('Altitude [m]')plt.show()
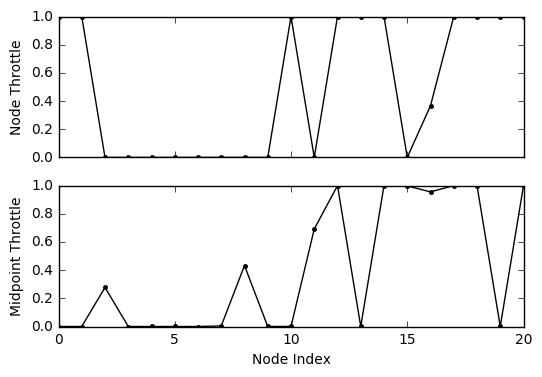
# and look at the control throttleplt.close('all')f,ax=plt.subplots(2,sharex=True)ax[0].plot(c[:,0],'k.-')ax[1].plot(cb[:,0],'k.-')plt.xlabel('Node Index')ax[0].set_ylabel('Node Throttle')ax[1].set_ylabel('Midpoint Throttle')plt.show()
# We save the optimised trajectory decision vectorsave('HSD0',pop.champion.x)
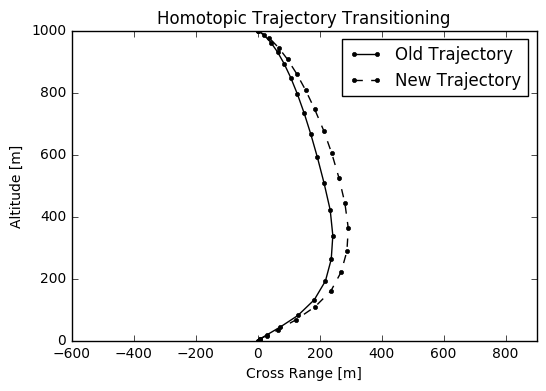
# We perturb the initial state and find a optimsal trajectory# Decreasing the velocity by a few m/s for demonstrationprob=Hermite_Simpson(Point_Lander(si=[0,1000,10,-5,9900]))# and create a population for the new problempop=population(prob)# and add the previous population decision vectorpop.push_back(z)
# We then optimise the trajectory, this now will not take long!pop=alg1.evolve(pop)
# We now compare this new perturbed trajectory to the previoustf1,cb1,s1,c1=prob.Decode(pop.champion.x)plt.close('all')plt.figure()plt.plot(s1[:,0],s1[:,1],'k.-')# The new trajectoryplt.plot(s[:,0],s[:,1],'k.--')# The old trajectoryplt.legend(['Old Trajectory','New Trajectory'])plt.title('Homotopic Trajectory Transitioning')plt.axes().set_aspect('equal','datalim')plt.xlabel('Cross Range [m]')plt.ylabel('Altitude [m]')plt.show()
# In essence, we will incrementally perturb the dynamical system's# initial state and repeatedly compute new optimal trajectories.# So, again we store the new trajectory decisions vectorsave('HSD1',pop.champion.x)
# Store the current decisionz=pop.champion.x
# Now we try perturbing the initial position rather# We instantiate the problemprob=Hermite_Simpson(Point_Lander(si=[-10,1000,10,-5,9900]))# and create a population for the new problempop=population(prob)# and add the previous population decision vectorpop.push_back(z)
# We then optimise the trajectory, this now will not take long!pop=alg1.evolve(pop)
# We now compare this new perturbed trajectory to the previoustf2,cb2,s2,c2=prob.Decode(pop.champion.x)
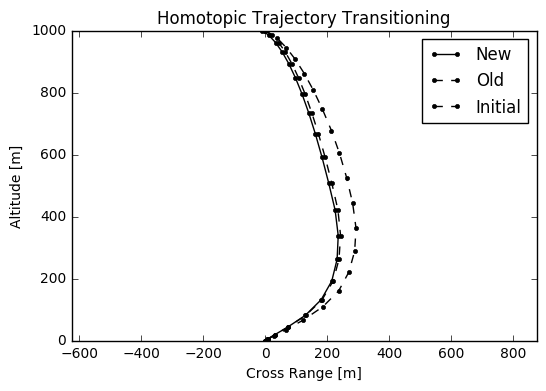
plt.close('all')plt.figure()plt.plot(s2[:,0],s2[:,1],'k.-')# The new trajectoryplt.plot(s1[:,0],s1[:,1],'k.--')# The old trajectoryplt.plot(s[:,0],s[:,1],'k.--')# The initial trajectoryplt.legend(['New','Old','Initial'])plt.title('Homotopic Trajectory Transitioning')plt.axes().set_aspect('equal','datalim')plt.xlabel('Cross Range [m]')plt.ylabel('Altitude [m]')plt.show()
# Again, save the decisionsave('HSD2',pop.champion.x)z=pop.champion.x
# We instantiate the problem one last timeprob=Hermite_Simpson(Point_Lander(si=[-10,1000,0,-5,9900]))# and create a population for the new problempop=population(prob)# and add the previous population decision vectorpop.push_back(z)
# We then optimise the trajectory, this now will not take long!pop=alg1.evolve(pop)
# We now compare this new perturbed trajectory to the previoustf3,cb3,s3,c3=prob.Decode(pop.champion.x)
%matplotlibinline%configInlineBackend.figure_format='svg'plt.close('all')plt.figure()plt.plot(s3[:,0],s2[:,1],'k.-')plt.plot(s2[:,0],s2[:,1],'k.--')# The new trajectoryplt.plot(s1[:,0],s1[:,1],'k.--')# The old trajectoryplt.plot(s[:,0],s[:,1],'k.--')# The initial trajectoryplt.legend(['New','Old'])plt.title('Homotopic Trajectory Transitioning')plt.axes().set_aspect('equal','datalim')plt.xlabel('Cross Range [m]')plt.ylabel('Altitude [m]')#plt.savefig('Homotopic_Transitioning.pdf', format='pdf',# transparent=True, bbox_inches='tight')plt.show()
# I think we get it now... time to do this more programmatically# but first we again save the decision vectorz=pop.champion.xsave('HSD3',z)